

磁気式 エンコーダー : 非接触 ロータリー, 非接触 リニアー 各機種 右下にある 仕様 詳細を クリックし 出たページの Data Sheetの[EN]をクリックして 仕様書をご覧ください。 このページに 書いてある仕様は 概要です。必ず Küblerの仕様書で 判断の上 ご注文下さい。 |
|||||||||||||
|
磁気式 非接触 ロータリー エンコーダー |
|||||||||||||
 |
|

|  |
||||||||||
 |
① 磁気式 ロータリー エンコーダー RIM200 (IP67, 68, 89k) センサー: 10.2W x 40L x 25H mm ローター 外径 Φ31~45mm, 幅 16mm 分解能 10μm, 速度 25m/秒 出力回路 RS422, Push-Pull 出力電圧4.8-26 VDC 最速回転 12,000/min 型式 8.RIM200.xxxxA.xxx.xxxxx.xxxxxx.xxxx 仕様 詳細 | 
|
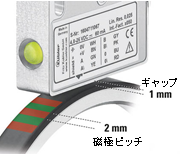
(1) 磁気式 ベルト エンコーダー Inc. LI20 / B1 (IP67, 68, 89k) センサー: 10.2W x 40L x 25H mm 磁気ベルト 10mm幅 x 最長 70m 分解能 10μm max, 速度 25m/秒 出力回路 : RS422, Pushu-Pull 出力電圧: 4.8-30VDC センサー型式 8.LI20. x1xc. 2xxx ベルト型式 8.B1.10. 010. xxxx 仕様 詳細 |
||||||||||
 |
② ロータリー エンコーダー RIM500 (IP67, 68, 89k) センサー: 10.2W x 40L x 25H mm ローター 外径 Φ41.2~202.3mm 幅 9~20mm 分解能 10μm, 速度 25m/秒 出力回路 RS422, Push-Pull 出力電圧4.8 - 26 VDC 最速回転 12,000/min 型式 8.RIM200.xxxxA.xxx.xxxxx.xxxxxx.xxxx 仕様 詳細 | 
|
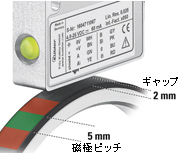
(2) 磁気式 ベルト エンコーダー Inc. LI50 / B2 (IP67, 68, 89k) センサー: 10.2W x 40L x 25H mm 磁気ベルト 10mm幅 x 最長 70m 分解能 5μm, 速度 16m/秒 出力回路 : RS422, Pushu-Pull, TTL 出力電圧: 4.8 - 30VDC センサー型式 8.LI50. x1xc. 2xxx ベルト型式 8.B2.10. 010. xxxx 仕様 詳細 |
||||||||||
|
③ ロータリー エンコーダー Inc. RIM2000 (IP67, 68, 89k) センサー: 10.2W x 40L x 25H mm ローター外径 Φ31-45,48, 9-202.3mm 幅 16, 9~104mm 分解能 10μm, 速度 25m/秒 出力回路 TTL/RS422, Push-Pull 出力電圧4.8 - 26 VDC 最速回転 12,000/min 型式 8.RIM2000.xxxxA.xxx.xxxxx.xxxxxx.xxxx 仕様 詳細--> | 
|
(3) 磁気式 ベルト エンコーダー Abs. LA10 / BA1 (IP64) センサー: 16W x 70L x 30H mm 磁気ベルト 10mm幅 x 最長 8m 分解能 1μm, 速度 10m/秒 出力回路 : CANopen SinCos SSI,binar 出力電圧: 10 - 30 VDC センサー型式 8.LA10.12x2 ベルト型式 8.BA1.1.010.xxxx 仕様 詳細
| |
